PhD. MSc. Khaldon Araffa
Robotics | Innovator | Educator

Robotics Fileds
Global Engineering Manager – Soliton Systems (Japan)
Since 2024, I have been serving as the Global Engineering Manager at Soliton Systems B.V., the European branch of Soliton Systems K.K., a leading Japanese technology company. In this strategic role, I lead international robotics teleoperation projects and real-time video transmission systems. My responsibilities include overseeing the integration of Zao SDK into advanced robotics and vehicle platforms, managing global technical deployments, and supporting key clients across Europe, Asia, and beyond.
Postdoc Robotics Researcher at TU Delft, Netherlands
Lecturer at Igor Sikorsky Kyiv Polytechnic Institute, Ukraine
Invest in Young Talent: Shaping the Future with Khaldon Araffa's Vision
Zao SDK Development Team (Robotics) - Soliton, Japan
Languages
Skills
Publications
- Tkach M., Araffa Kh., Humennyi D. Review The methods and approaches for planning trajectory biped walking biped robot and introduce a new concept for maintaining the highest safety factor on uneven terrain during dynamic walking. Адаптивні системи автоматичного управління. 2016. Vol. 2, Issue 29. P. 3–12 (вирішена задача знаходження абсолютного положення стопи двоногого робота з найбільшим запасом стійкості).
- Araffa Kh. Planning trajectory of anthropomorphic walking robot (biped robot). Microsystems, Electronics and Acoustics. 2019. Vol. 24, No. 2. P. 51–55 (запропоновано підхід до генерації траєкторії руху АКА з використанням тривимірного лінійного перевернутого маятника, яка утримує точку нульового моменту).
- Araffa H., Tkach M. Analytical method of formation of a trajectory of motion of anthropomorphic walking apparatus. Visnyk of Kherson National Technical University. 2019. Vol. 69, Issue 2. P. 134–138 (сформовано розрахункову (опорну) траєкторію руху АКА і руху уздовж неї).
- Araffa Kh., Tkach M., Khlaponin Yu. Appling the forward kinematic of the biped robot with 12 DOF based denavit and hartenberg method. Сучасний захист інформації. 2019. Vol. 37, Issue 1. P. 36–47 (сформовано кінематичну модель руху АКА на основі методу Денавіта-Хартенберга).
- Selyukov A., Araffa Kh., Khlaponin Y., Lialina N. Compensator of trajectory instabilities of aviation radar with aperture synthesis. Problems of Infocommunications. Science and Technology. 2019. P. 727–731 (запропоновано спосіб компенсації траєкторії руху з апертурним синтезом).
- Рудніцька О., Араффа Х. Централізована система управління розподіленими кіберфізичними системами. Вісник Інженерної академії України. 2019. Вип. 1. C. 83–88 (розглянуті принципи декомпозиції динамічних компонентів руху кіберфізичних систем).
- Araffa Kh., Tkach M. Implementation and Simulation A Model Predictive Control for Motion Generation of Biped Robot. Адаптивні системи автоматичного управління. 2019. Vol. 2, No. 35. P. 3–12 (синтезовано систему управління для стабілізації траєкторії центру мас і точки нульового моменту за допомогою МРС-підходу).
- Stenin A., Lisovichenko O., Drozdovych I., Soldatova M., Araffa Kh. Methods of reducing the dimension of technical dynamic systems. Bulgarian Journal for Engineering Design. 2020. No. 42. Р. 176–179 (запропоновано метод агрегації змінних стану динамічних систем).
- Araffa K. Planning trajectory for the lower limbs of bipedal robot using inverted pendulum: матеріали IV Всеукраїнської науково-технічної конференції «Теоретичні та прикладні аспекти радіотехніки, приладобудування і комп’ютерних технологій» (м. Тернопіль, 20–21 червня 2019 року). Тернопіль: ФОП Паляниця В. А., 2019. С. 163–164 (запропоновано метод планування траєкторії руху АКА за допомогою 3D-LIPM моделі).
- Araffa K. Controlling Stability Walking of Biped Robot on Uneven Terrain Based On CMP. Наука – майбутнє України: матеріали VIII Міжнародної науково-практичної інтернет-конференції (м. Вінниця, 24 березня 2017 року). Вінниця, 2017. C. 4–5 (сформовано опорну траєкторію стійкого руху АКА).
- Araffa K. Overview strategy of position controlling of bipedal robot (AKA). Інформаційне суспільство: технологічні, економічні та технічні аспекти становлення: Міжнародна наукова інтернет-конференція (м. Тернопіль, 13 вересня 2019 року). Випуск 41, 2019. C. 94–96 (запропоновано алгоритм управління рухом АКА на нерівній місцевості).
- Араффа Х. Задача планирования траектории движения антропоморфного шагающего аппарата. Інформаційне суспільство: технологічні, економічні та технічні аспекти становлення: Міжнародна наукова інтернет-конференція (м. Тернопіль, 11 червня 2019 року). Випуск 39, 2019. C. 117–118 (визначені основні фази руху АКА).
Deep Details ...
-
Robotics Researcher
-
Teaching


Hello, I'm Dr. Khaldon Araffa, a passionate postdoctoral researcher specializing in Robot Dynamics at the Faculty of Mechanical Engineering, Department of Cognitive Robotics, TU Delft. My journey in robotics and mechatronics, marked by an unwavering passion and dedication, has led me to this esteemed institution. Here, I collaborate on groundbreaking projects with outstanding colleagues under the expert guidance of Professor Martijn Wisse.
Ph.D :
My academic foundations are in a Ph.D. from the National Technical University of Ukraine 'Kyiv Polytechnic Institute', specializing in Mechatronics, Robotics, and Automation Engineering.
Teaching educational curricula:
In addition to my research, I am committed to academic instruction, participating in courses like “RO47003 Robot Software Practicals” and “Multidisciplinary Project – RO47007”. Furthermore, I have the privilege of educating second-year students at Igor Sikorsky Kyiv Polytechnic Institute, Ukraine, in “Information and Sensor Systems of Robots.”.
-
Invest in Young Talent


Invest in Young Yalent
Beyond the university's walls, my commitment to the community is unwavering. I firmly believe in empowering society, especially children and those with special needs, through education. This belief led me to establish the 'Invest in Young Talent' initiative, aiming to inspire and nurture the next generation of technological innovators.
- Before the Russian invasion of Ukraine
- Honor from the Guinness Book









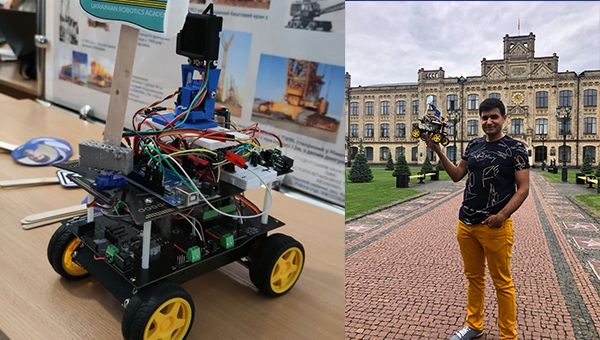

Ukraine
Before the tumultuous onset of the Russian invasion of Ukraine, I was the proud owaner of "Positive Film",and “Studio Positive Film” a film production and rental company, and the "Ukrainian Robotics Academy", both contributing significantly to the local and international landscape of art, technology, and education. Additionally, I own and managed "Araffa Group", a business development company where we transform ideas into reality.
Unfortunately, all of these actions were stopped because some of them were directly targeted.
Honor from the Guinness Book
I received an honor from the Guinness Book of World Records in Ukraine for organizing a celebration that included an exhibition of 1000 Ukrainian children and 50 children painting a single large oil painting measuring 15 meters in length.
- My Childhood


In my childhood
I started programming at the age of 12 and received numerous local and international awards. By the age of 16, I had my own office in the fields of programming and printing services. I have conducted many programming courses in various places since the age of 17, starting with my own school when I was 15. At that age, I wrote a 100-page book on HTML and successfully published it.
Life for me is a continuous journey of learning and development. Routine is not in my vocabulary; I thrive on innovation and progress. Photography, film production and business development are not just interests but a way of life, reflecting my philosophy of constant growth and contribution to society.