مدونة د.خلدون عرفة للروبوتيك
الفيزياء مع أنظمة الروبوتيك من النظرية إلى التطبيق(روبوت يتحرك على منحدر)

مقدمة:
تعتبر الفيزياء من العلوم الأساسية التي تشكل حجر الأساس لتصميم وتطوير الأنظمة الروبوتية. فهي تُستخدم لفهم الحركة، الديناميكا، الطاقة، والقوى الداخلية والخارجية المؤثرة على حركة وسلوك الروبوتات. ومع ذلك، غالبًا ما يواجه الطلاب بمختلف مستوياتهم تحديات في ربط النظريات الفيزيائية بالتطبيقات العملية في مجال الروبوتيك. هنا أريد تسليط الضوء على أهمية الفيزياء في الروبوتيك، التحديات التي يواجهها الطلاب، والاستراتيجيات العامة لتحسين هذا الرابط. ستجد أيضًا تطبيقًا عمليًا يدعم المفاهيم المطروحة.
حتى نفهم هذا الربط، سوف أقوم معك بأخذ مثال وننظر إليه سوية من الخارج ( ننظر من خارج الصندوق) ، ثم نقوم بتفكيك هذا النظام المتكامل إلى خطوات عبر طرح مجموعة متسلسلة ومترابطة من الأسئلة التي تقودنا إلى إجابات تشرح عمل هذا النظام أو المثال. هذه هي الطريقة والمنهج الذي اتبعه عادة مع طلابي خلال ورشات العمل التي أجريها تحت مباردتي "الإستثمار في العقول الشابة" إن هذا المبدأ يقوم على مبدأ "البداية من النهاية" (Start From The End).
في نهاية هذا المقال، سوف تكون قادرًا على حساب والتعامل مع بعض المعادلات والتعريفات الفيزيائية تساعدك على ربط الفيزياء وقوانينها المختلفة مع علم الروبوتيك.
مثال عملي: روبوت يتحرك على منحدر

إنه من الأمثلة الشائعة، وخاصة في الروبوتات المتنقلة (Mobile Robots)، التي تكون مخصصة للعمل في بيئات خارجية. إن بناء أنظمة تحكم لهذا النوع من الروبوتات تكون معقدة وذات طبقات مختلفة بسبب طبيعة المهام التي يجب أن نتعامل معها لجعل الروبوت يسير دون التعرض لفقدان في التوازن وخاصة عندما يعمل الروبوت في بيئة ذو تضاريس غير معروفة أو غير مستوية كالتضاريس التي تتكون من منحدرات حيث يصبح من المهم الحفاظ على توازن الروبوت خلال نزوله على المنحدر.
وفي العودة إلى مثالنا سوف نقوم بوضع هدف نهائي من خلال فهمه وطريق الوصول إليه سوف نتعرف على بعض القوانين الفيزيائية وبشكل عملي وهذا سوف يعزز الفهم لديك لتبحر في تطوير هذه الأمثلة واستخدامها لاحقاً في مشاريعك التالية.
الهدف النهائي:
تصميم نظام تحكم لنظام روبوتي يمكنه التحرك على منحدر بفعالية ودون انزلاق. لفهم كيفية تحقيق ذلك، يجب تحليل القوى المؤثرة على الروبوت وتطبيق القوانين الفيزيائية التي تساعد على فهم هذه القوى وتحليلها. لهذا، سوف نقوم بتصميم نظام حركة روبوتي يعتمد على تحليل القوى الأساسية وهي (الجاذبية، الاحتكاك)
و لفهم هذه المخرجات وقيمها يجب أن نستعرض المدخلات التي يحتاجها نظامنا الروبوتي وخطوات الحل التي سوف نتبعها والتي في نهايتها نحصل على التسارع الذي يحدد كيف ستتغير سرعة الروبوت بمرور الزمن.
سوف أسرد هذه المعلومات وسوف نقوم بمناقشتها ببعض التفصيل في القسم التالي.
المدخلات هي :
- كتلة الروبوت،
- زاوية المنحدر،
- معامل الاحتكاك.
- حساب القوى المؤثرة على الروبوت (الجاذبية والاحتكاك)
- تحديد القوة الصافية المؤثرة على النظام (تسارع الروبوت )
المدخلات:
1- كتلة الروبوت:
- ما هي كتلة الروبوت؟
إن كتلة الروبوت تعتبر خاصية فيزيائية تمثل مقدار المادة في جسم معين. كلما زادت الكتلة، زادت القوة المطلوبة لتحريكه أو لتغيير حالته الحركية. على سبيل المثال، روبوت يزن 10 كغ يحتاج إلى ضعف القوة لتحريكه مقارنة بروبوت وزنه 5 كغ.
- ما هو الربط بين كتلة الروبوت والقوة المحركة؟
إن زيادة الكتلة تعني أن القوة المطلوبة للتسارع أو التغلب على الاحتكاك تزداد أيضًا. العلاقة خطية وفقًا لقانون نيوتن الثاني. - ما هو قانون نيوتن الثاني وكيف استفاد منه؟
ينص قانون نيوتن الثاني على أن القوة المؤثرة على جسم ما تساوي حاصل ضرب كتلته في تسارعه. يُعبر عن القانون رياضيًا بالعلاقة:

حيث:
- F: القوة المؤثرة على الجسم (بوحدة نيوتن).
- m: كتلة الجسم (بوحدة كيلوجرام).
- a: تسارع الجسم (بوحدة متر/ثانية²).
تفسير القانون:
عندما تؤثر قوة على جسم ما، فإنها تغير من حالته الحركية (التسارع). هذا التغيير يتناسب طرديًا مع مقدار القوة المؤثرة، وعكسيًا مع الكتلة. أجسام الروبوتات الثقيلة تحتاج إلى قوة أكبر لتحقيق نفس مقدار التسارع مقارنة بالروبوتات ذات الأجسام الخفيفة.
بعض التطبيقات لقانون نيوتن الثاني في الروبوتيك:
- حساب القوة المطلوبة لتحريك الروبوت : يساعد في تحديد كمية الطاقة اللازمة لتحريك الروبوت بناءً على كتلته.
- تحديد التسارع الناتج عن قوة محركات الروبوت: يتيح تصميم محركات فعالة تلبي احتياجات النظام.
- تصميم أنظمة الحركة والتحكم: يُستخدم لضمان استقرار الروبوت وكفاءته أثناء الأداء.
2- زاوية المنحدر:
- ماهي زاوية المنحدر (θ) ؟
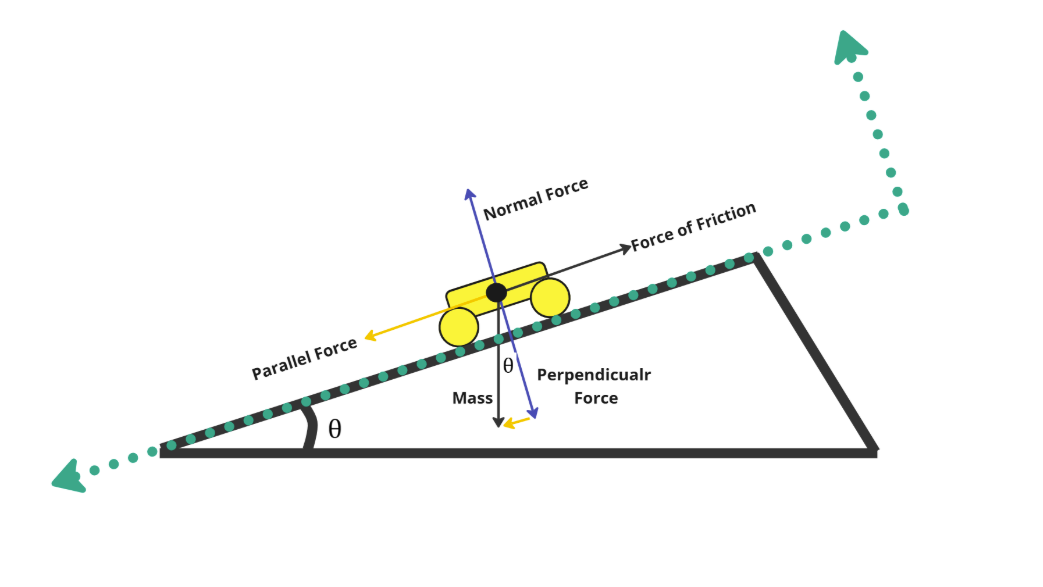
هي الزاوية التي يصنعها السطح المائل بالنسبة إلى السطح الأفقي. تلعب هذه الزاوية دورًا أساسيًا في تحديد تأثير قوة الجاذبية على جسم موجود على منحدر. يتم تقسيم قوة الجاذبية إلى مكونين رئيسيين بناءً على زاوية الميل:
- المكون الموازي للمنحدر (Fparallel): هذا هو المكون المسؤول عن انزلاق الجسم على المنحدر، ويتم حسابه باستخدام العلاقة:

- m: كتلة الجسم (بوحدة كيلوجرام).
- g: تسارع الجاذبية الأرضية (9.81 م/ث²).
- θ: زاوية المنحدر.

- كيف تؤثر زاوية المنحدر على حركة الروبوت؟
- زاوية صغيرة: تقل القوة الموازية للمنحدر، مما يجعل الجسم أقل عرضة للانزلاق.
- زاوية كبيرة: تزيد القوة الموازية للمنحدر، مما يزيد احتمالية انزلاق الجسم.
في التطبيقات العملية كيف نحصل على زاوية المنحدر كون الروبوتات من الممكن أن تتحرك في بيئات غير معروفة ؟
يتم ذلك باستخدام تقنيات وأجهزة استشعار متخصصة . أمثلة عنها
- استخدام مستشعرات التسارع (Accelerometers): تقيس مستشعرات التسارع مكونات التسارع على المحاور الثلاثة (xxx, yyy, zzz) بالنسبة للجاذبية الأرضية.
- استخدام الجيروسكوب (Gyroscopes): يقيس الجيروسكوب معدل التغير في الزاوية (Angular Velocity).
- استخدام مستشعر الميل (Inclinometer): يقيس زاوية الميل بشكل مباشر بالنسبة إلى سطح الأرض باستخدام مكونات الجاذبية.
ولهذا، عند العمل على تطوير نظام تحكم لروبوت يتحرك على منحدر:
- يتم استخدام زاوية المنحدر لحساب القوة الموازية للجاذبية، لضمان توازن الروبوت أثناء حركته.
- يمكن أيضًا تحديد قوة المحرك اللازمة لتحريك الروبوت أو منعه من الانزلاق باستخدام العلاقات الفيزيائية المذكورة أعلاه.
مثال نظري :
روبوت ذو كتلة m=10 kg كجم يتحرك على منحدر بزاوية30:
- القوة الموازية: Fparallel=10⋅9.81⋅sin(30) ≈ 49.05 نيوتن
- القوة العمودية: Fperpendicular=10⋅9.81⋅cos(30) ≈ 84.87 نيوتن
3- معامل الإحتكاك:
- ما هو معامل الاحتكاك(𝜇)؟ هو كمية فيزيائية تُعبر عن مقدار المقاومة التي يواجهها جسم الروبوت أثناء حركته أو محاولته للحركة على سطح معين. يعكس هذا المعامل مدى "خشونة" أو "نعومة" السطحين المتلامسين. كلما زاد معامل الاحتكاك، زادت المقاومة بين الجسم والسطح.
- ماهي أنواع معامل الاحتكاك؟:
- معامل الاحتكاك الساكن (μs)
- يُستخدم عندما يكون الجسم في حالة سكون ويحتاج إلى قوة معينة ليبدأ في التحرك.
- يعبر عن المقاومة القصوى قبل بدء الحركة.
- معامل الاحتكاك الحركي (μk)
- يُستخدم عندما يكون الجسم في حالة حركة بالفعل.
- يعبر عن المقاومة أثناء الحركة.
- كيف أحسب قوة الاحتكاك؟:
يمكن حساب قوة الاحتكاك باستخدام العلاقة:

حيث:
- F friction: قوة الاحتكاك.
- μ: معامل الاحتكاك.
- F perpendicular: القوة العمودية المؤثرة على الجسم.( تم التطرق إليها سابقاً)
ولكن كيف نحصل على قيمة معامل الاحتكاك؟
يمكن الحصول على قيمة معامل الإحتكاك عن طريق أرقام سابقة تم حسابها أو عن طريق قياسها يمكن تخليص وسائل الحصول على قيمة المعامل بما يلي :- الجداول المعيارية: استعن بالجداول التي تحتوي على قيم معاملات الاحتكاك لمواد مختلفة (مثل المطاط على الإسفلت).
- القياس العملي:
- معامل الاحتكاك الساكن (s): استخدم زاوية الانزلاق واحسبه باستخدام العلاقة:
- معامل الاحتكاك الحركي (k): حرك الجسم بسرعة ثابتة واحسب:
- أجهزة قياس الاحتكاك:
- استخدم أجهزة متخصصة (Tribometer) للحصول على قياسات دقيقة.
- استخدام مستشعرات الروبوت:
- إذا كان الروبوت مزودًا بمستشعرات قوة، يمكن استخدام قيم المستشعرات لحساب معامل الاحتكاك من القوة العمودية وقوة الاحتكاك.
- التقدير من الخبرة:
- اعتمد على البيانات والتجارب السابقة لتقدير قيمة μ إذا كانت المواد والبيئة معروفة.
هذه الطرق تتضمن قياسًا دقيقًا لمعامل الاحتكاك لتحديد قوة الاحتكاك المطلوبة في تصميم الأنظمة الروبوتية.
- ماهو تأثير معامل الاحتكاك:
- معامل احتكاك منخفض: السطح أملس، مثل الجليد، مما يجعل الجسم ينزلق بسهولة.
- معامل احتكاك مرتفع: السطح خشن، مثل الإسفلت، مما يجعل الحركة أكثر صعوبة.
مما سبق نلاحظ أنه عند تصميم روبوت يتحرك على منحدر، يُستخدم معامل الاحتكاك لحساب قوة الاحتكاك المطلوبة لمنع انزلاق الروبوت، أو لضمان قدرته على التوقف والحركة بأمان.
التحليل الفيزيائي والحصول على المخرجات
بعد أن تعرفنا على المدخلات التي يحتاجها نظامنا الروبوتي وقمنا بالغوص ولو بشكل طفيف ببعض التفاصيل وتعرفنا على كيفية الحصول عليها وللتذكير فإن المدخلات هي ( كتلة الروبوت، زاوية المنحدر و معامل الإحتكاك ).
وللتذكير أيضاً فأن هدفنا هو الحصول على تسارع الروبوت الذي يحدد كيف ستتغير سرعة الروبوت بمرور الزمن.وللحصول على هذا التسارع نحتاج أن نقوم بخطوتين :
- حساب القوى المؤثرة على الروبوت (الجاذبية والاحتكاك)
- تحديد القوة الصافية المؤثرة على النظام (تسارع الروبوت )
1- حساب القوى المؤثرة على الروبوت (الجاذبية والاحتكاك):
عند وضع الروبوت على منحدر، تعمل عليه عدة قوى، وأهمها:
- قوة الجاذبية (Fgravity): والتي تتكون من:
- المكون الموازي للمنحدر( Fparallel ) هذا المكون هو الذي يسبب انزلاق الروبوت على المنحدر.
- المكون العمودي على المنحدر(Fperpendicular) : هذا المكون يحدد القوة التي يضغط بها الروبوت على السطح المائل.
- قوة الاحتكاك (Ffriction): هي القوة التي تعارض حركة الروبوت أو محاولته للحركة. تعتمد على معامل الاحتكاك (𝜇) والقوة العمودية
لقد تعرفنا عند مناقشتنا المدخلات على كيفية حساب كل من القوى السابقة التي تؤثر على الروبوت خلال حركته.
2- تحديد القوة الصافية المؤثرة على النظام ( Fnet):
القوة الصافية هي مجموع القوى المؤثرة على الروبوت بعد أخذ جميع الاتجاهات بعين الاعتبار. تُحسب باستخدام العلاقة:

سوف نستنتجج من هذه المعادلة أنه إذا كانت القوة الموازية للجاذبية ( Fparallel) أكبر من قوة الاحتكاك (Ffriction )، فإن الروبوت يتحرك على المنحدر. إذا كانت القوة الموازية أقل، يبقى الروبوت ثابتًا.
الخطوة الاخيرة هي الحصول على تأثير القوة الصافية:
تُستخدم القوة الصافية لحساب تسارع الروبوت وهو هدفنا النهائي في هذه المقالة وذلك باستخدام قانون نيوتن الثاني:
هذا التسارع يحدد كيف ستتغير سرعة الروبوت بمرور الزمن.
بالعودة إلى مثالنا الحالي :
روبوت بكتلة m=10 كجم، يتحرك على منحدر بزاوية 30∘ ومعامل احتكاك μ=0.2:
- حساب المكون الموازي للجاذبية (Fparallel): Fparallel=10⋅9.81⋅sin(30∘)≈49.05
- حساب المكون العمودي للجاذبية (𝐹perpendicular) Fperpendicular=10⋅9.81⋅cos(30∘)≈84.87
- حساب قوة الاحتكاك (Ffriction) Ffriction=0.2⋅84.87≈16.97
- حساب القوة الصافية (Fnet) Fnet=49.05−16.97≈32.08
- حساب التسارع الناتج (a) a=32.0810≈3.21م/ث2
مثال عملي مع كود برمجي:
بعد أن قمنا بالوصول إلى هدفنا وتعرفنا على كيفية الحصول عليه سوف نتطرق في هذا القسم إلى كيفية الحصول على هذا تسارع الروبوت برمجياً وسوف نقوم بمحاكاة النتائج لفهم السلوك المتوقع للروبوت.
الكود التالي يوضح وبشكل عملي باستخدام لغة البايثون
import numpy as np
import matplotlib.pyplot as plt
# المتغيرات الأساسية
mass = 5 # كتلة الروبوت بالكيلوغرام
angle = 30 # زاوية المنحدر بالدرجات
g = 9.81 # تسارع الجاذبية الأرضية بالمتر/الثانية^2
mu = 0.15 # معامل الاحتكاك
# تحويل الزاوية إلى راديان
angle_rad = np.radians(angle)
# حساب القوى المؤثرة
force_gravity = mass * g * np.sin(angle_rad) # قوة الجاذبية المؤثرة
force_friction = mu * mass * g * np.cos(angle_rad) # قوة الاحتكاك
net_force = force_gravity - force_friction # القوة الصافية المؤثرة
# حساب التسارع
acceleration = net_force / mass
# الزمن والمحاكاة
time = np.linspace(0, 10, 100) # الزمن من 0 إلى 10 ثوانٍ
velocity = acceleration * time # السرعة
position = 0.5 * acceleration * time**2 # الإزاحة
# الرسم البياني
plt.figure(figsize=(10, 6))
plt.plot(time, position, label="الإزاحة (Position)")
plt.plot(time, velocity, label="السرعة (Velocity)")
plt.xlabel("الزمن (Time) [s]")
plt.ylabel("القيمة (Value)")
plt.title("محاكاة حركة روبوت على منحدر")
plt.legend()
plt.grid()
plt.show()
عند تشغيل الكود السابق سوف يكون الخرج عبارة عن رسم بياني
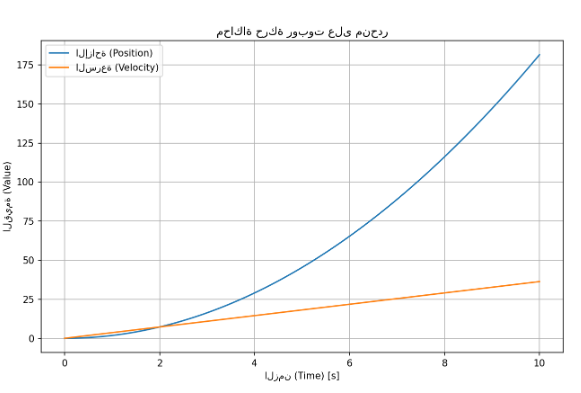
المخرجات النهائية:
إن الرسم البياني السابق يوضح تطور وتغير الإزاحة والسرعة للروبوت على منحدر بمرور الزمن. ويشرح حركة الروبوت تحت تأثير الجاذبية والاحتكاك على المنحدر.
الخاتمة:
في هذا المقال، قمنا بتحليل مثال عملي يوضح كيفية تطبيق قوانين الفيزياء، مثل قانون نيوتن الثاني، لفهم ديناميكيات الحركة على منحدر. كما تناولنا كيفية حساب القوى المؤثرة والتسارع باستخدام معادلات فيزيائية مدعومة بمحاكاة برمجية.
- الفيزياء كأساس للتصميم: يوفر الربط بين الفيزياء والتطبيق العملي إطارًا قويًا لفهم وتحليل أداء الأنظمة الروبوتية.
- التقنيات العملية: تعلمنا كيفية استخدام معادلات فيزيائية وأجهزة استشعار لتحديد المدخلات اللازمة، مثل زاوية المنحدر ومعامل الاحتكاك
- التطبيق البرمجي: من خلال محاكاة الكود البرمجي، يمكن للطلاب والمهندسين فهم كيفية التفاعل بين العوامل الفيزيائية المختلفة.
حول المقالة
-
متوسط
الحقوق
© ملاحظة: احترام حقوق النسخ ليس فقط واجبًا قانونيًا، بل يعكس أيضًا أخلاقيات العمل واحترام إبداعات الآخرين.
عندما تشترك في المدونة سنرسل لك بريدا إلكترونيا عندما تكون هناك مقالات جديدة على الموقع حتى لا تفوتها.
تعليقات